近日,永利官网博士生刘自强在海洋工程领域国际权威期刊《Ocean Engineering》发表题为“Reinforcement Learning-Based Path Tracking for Underactuated UUV Under Intermittent Communication”的学术论文。77779193永利官网海洋信息与智能装备团队负责人蔡文郁教授为论文的通讯作者。
《Ocean Engineering》是海洋工程领域的国际权威Top期刊,中科院JCR分区Q1,2023年影响因子5。期刊主编为国际著名的海洋工程专家、英国斯特拉斯克莱德大学副校长Atilla Incecik教授。
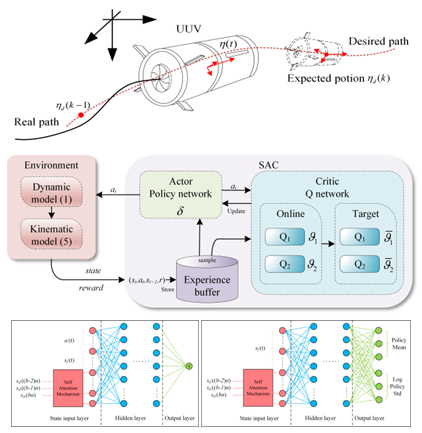
无人水下航行器(UUV)是专门为在水下环境中执行任务而特殊设计的特种机器人,已在海洋资源勘探、海底管道检修和水下目标搜救等领域获得广泛应用。基于环境自适应的运动控制方法在无人水下航行器的复杂行为和自主性方面具有至关重要的作用。“Reinforcement Learning-Based Path Tracking for Underactuated UUV Under Intermittent Communication”论文针对间隙性水声通信条件下的欠驱动UUV运动路径规划问题,基于强化学习方法提出采用注意力机制的最大熵强化学习算法(Self-Attention based Soft Actor and Critic, A-SAC),最终未知洋流等外部复杂环境下的鲁棒路径控制。