海洋信息与智能装备蔡文郁教授团队近月来在《IEEE Internet of Things Journal》期刊(ISSN: 2327-4662)连续发表两篇水下无人系统技术方向高水平论文“Cooperative Formation Control for Multiple AUVs with Intermittent Underwater Acoustic Communication in IoUT”(doi:10.1109/JIOT.2023.3262707,https://ieeexplore.ieee.org/document/10083165/)和“Improved BINN based Underwater Topography Scanning Coverage Path Planning for AUV in Internet of Underwater Things”(doi:10.1109/JIOT.2023.3280035,https://ieeexplore.ieee.org/document/10136370/)。《IEEE Internet of Things Journal》是国际顶尖期刊,是中科院 JCR一区 TOP期刊,2023 年影响因子达到 10.238。
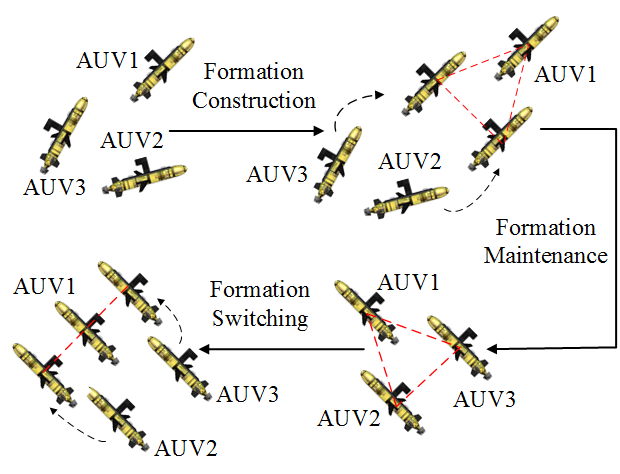
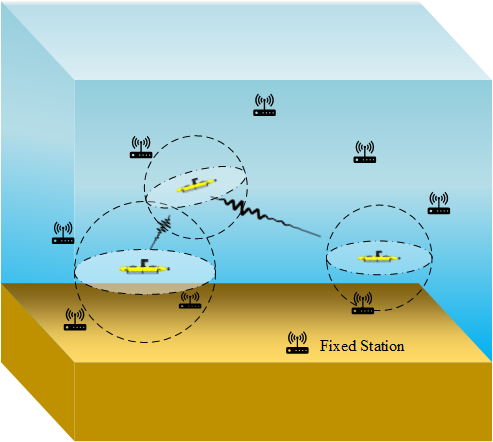
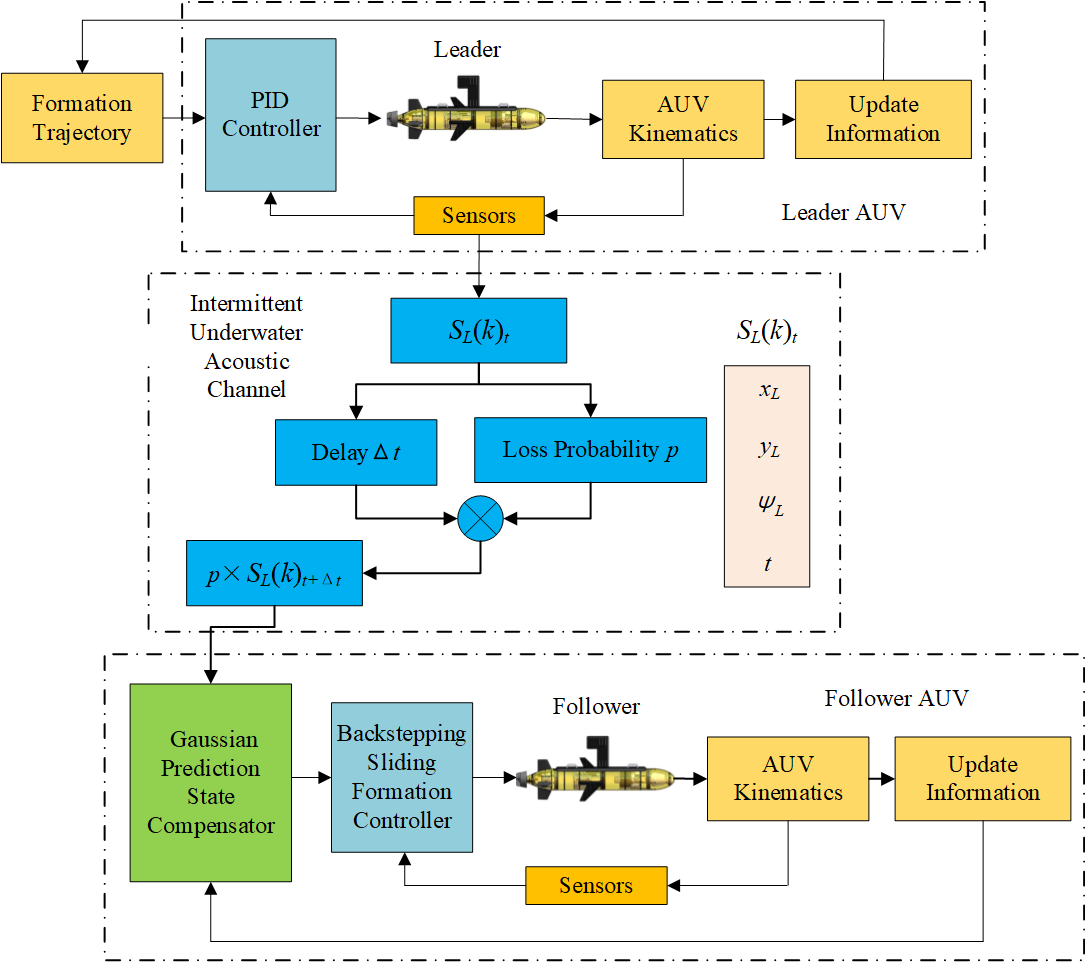
“Cooperative Formation Control for Multiple AUVs with Intermittent Underwater Acoustic Communication in IoUT”论文针对大规模IoUT中单台AUV数据收集效率低的问题,考虑了AUV之间水声通信的间歇性和不可靠性,提出一种基于状态预测估计的主从结构AUV编队控制方法。设计基于高斯过程回归与反步滑模编队控制律,增强受限通信下的信息获取能力并提升水下未知干扰下的编队控制稳定性。与现有方法相比,该方法同时考虑了通信时延和丢包的间歇性信道,编队抗干扰能力强,计算量小,可用于轻量级嵌入式平台的实时计算场景,具备更高的可操作性。该方法在水下AUV集群具有实际应用价值,可广泛用于水下资源勘探、水污染清理、灾害救援和海洋巡逻检查等领域。
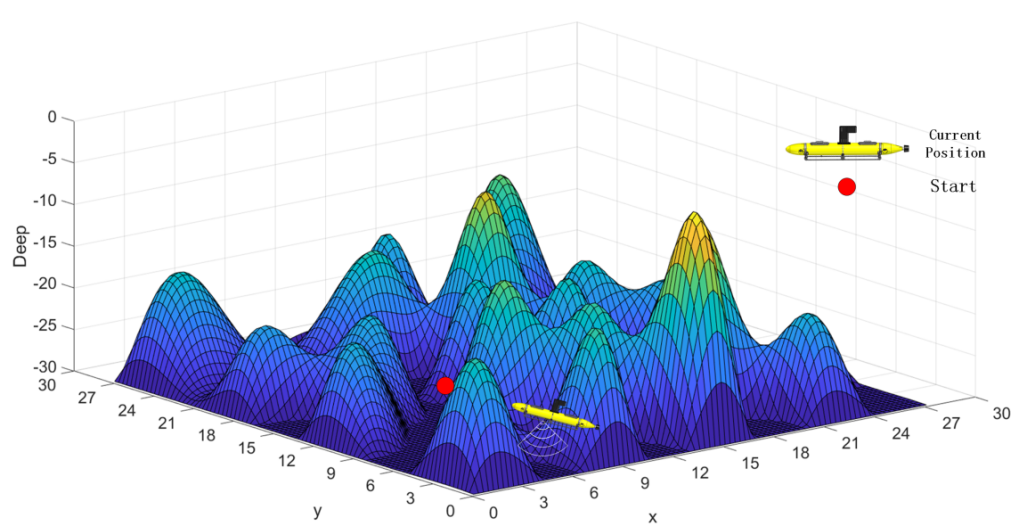
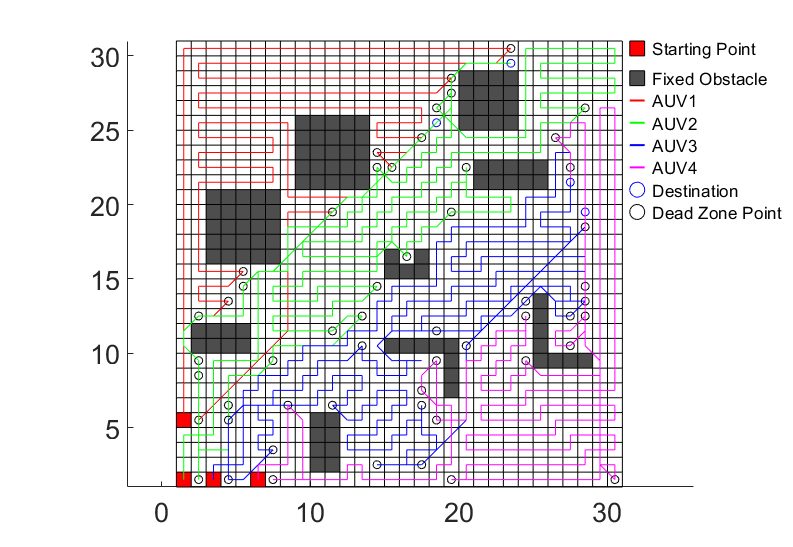
“Improved BINN based Underwater Topography Scanning Coverage Path Planning for AUV in Internet of Underwater Things”论文针对现有的全覆盖路径规划算法和死区逃离算法中存在的覆盖时间过长以及死区逃离失败等问题,提出了一种可以快速覆盖目标区域、安全快速逃离死区的高覆盖率全覆盖路径规划算法,从活跃值计算以及死区逃离两方面提升算法覆盖率和时效性。所研究的算法不仅具有覆盖率高、覆盖速度快等特点,还可以根据周围环境的变化动态规划路径,相比于传统全覆盖路径规划算法更加灵活、适应性更强。在海洋区域探索领域有很大的潜在应用价值,可以辅助海洋工作人员进行海洋目标探测、区域勘探以及海底地形复原等工作。

海洋信息与智能装备团队聚焦水下自主航行器(AUV)与水面无人艇(USV)等无人系统的智能控制、编队协同、目标探测等前沿技术方向,成功研制了10余台套50Kg级水下机器人。2023年在《IEEE Transactions on Instrumentation and Measurement》期刊发表论文“Long-Range UWB Positioning-Based Automatic Docking Trajectory Design for Unmanned Surface Vehicle”(doi:10.1109/TIM.2023.3271005,https://ieeexplore.ieee.org/document/10109770/),在《Robotics and Autonomous Systems》期刊发表综述论文“Cooperative Artificial Intelligence for Underwater Robotic Swarm”(doi:10.1016/j.robot.2017.01.005, https://www.sciencedirect.com/science/article/abs/pii/S0921889016301014),对人工智能在水下无人系统集群中的应用做了综述与展望。