一、团队名称
装备电子
二、团队介绍
装备电子团队背靠浙江省装备电子研究重点实验室,面向工业装备电子、汽车电子、电池管理、机器视觉、机器人控制等技术领域展开深入研究。团队坚持理论与应用研究并重,多个研究成果已经完成科技成果转化,已在浙江天能集团、超威集团、浙江康立自控等企业批量生产,“基于大数据分析的电动汽车动力电池包关键技术研究及应用”获得2020年度浙江省科学技术进步一等奖。

团队主要研究方向包括:
(1)装备电子方向:团队主要面向智能制造的行业专用机电设备等电子控制开展应用研究,自主开发了手套机、纱管理管机等多种纺织机械,自动包片机、自动配组仪等动力电池生产设备。例如,研制了基于ARM+CPLD硬件平台和CAN总线多伺服电机控制的全自动高速提花手套机,在编织效率上较市面同类机型提高10%~30%,编织工艺也更为全面,已成功推广应用,用户反映好。“新型纺纱数字化控制关键技术研究及产业化”获得2017年度浙江省科学技术进步二等奖。

图 团队开发的全自动高速提花手套机
(2)电池管理系统方向:研究多种通用动力电池SOC实时估算方法,健康状态在线估计方法,一致性评估方案以及故障检测与诊断技术。相关方向与超威集团、天能集团、数源科技等行业知名公司开展深入的合作。在Journal of Power Electronics,Electrochimica Acta,Journal of Power Sources,INDIN等国内外知名期刊和会议上发表学术论文30余篇,已申请发明专利20余件。获资助项目包括国家重大科研仪器研制项目1项、国家重点研发项目1项、国家自然科学基金联合基金1项、浙江省重点研发项目1项、国家自然科学基金面上项目2项。“基于大数据分析的电动汽车动力电池包关键技术研究及应用”获得2020年度浙江省科学技术进步一等奖。
近三年电池管理系统方向主要项目:
国家重大科研仪器研制项目 | 电动汽车电池包性能评估及故障诊断平台研制 | 2023-2027 |
国家重点研发计划项目课题 | 基于机器视觉的电池生产设备、工艺监控和产品质量分析 | 2020-2023 |
国家自然科学基金联合基金 | 基于海量数据学习的动力电池智能成组系统 | 2017-2020 |
浙江省重点研发计划项目 | 基于工业互联网的高端电池制造过程智能管控一体化关键技术研究与应用 | 2021-2023 |
(3)智能网联汽车方向:研究多传感器融合的环境智能感知技术,研究驾驶员行为识别与多模态人机交互方法,研究智能座舱和中央域控制器等。相关方向与零跑汽车、华锐捷、鸿泉、数源等行业内知名企业共同承担了浙江省“尖兵领雁”重点研发项目4项,承担企业横向项目多项,在International Journal of Computer Vision (IJCV),IEEE Transactions on Multimedia,电子与信息学报、AAAI,IJCAI等国内外知名期刊和学术会议上发表学术论文20余篇,已申请发明专利10余件。
近三年智能网联汽车方向主要项目:
浙江省“尖兵”研发攻关计划项目 | 基于车网融合的电动汽车运行安全关键技术研究及产业化应用 | 2022-2025 |
浙江省“领雁”研发攻关计划项目 | 高(快)速道路路空立体感知与协同管控关键技术研究与应用 | 2022-2025 |
浙江省“尖兵”研发攻关计划项目 | 车载智能视觉图像传感器研发及应用 | 2022-2024 |
浙江省重点研发计划项目 | 融合多种通信模式的车载智能终端与云信息平台的开发 | 2019-2021 |
(4)智能机器人方向:研究基于强化学习的智能机器人自主决策等技术。相关方向与浙江华叉、康立自控等企业共同承担浙江省重点研发项目2项,在IEEE Transactions on Industrial Electronics、自动化学报英文版、ROBIO等国内外知名期刊和学术会议上发表论文10余篇,已申请发明专利10余件。其中,协同式轻量化集装箱搬运机器人成果已获得2022年度浙江省首台(套)装备认定,并获得了2022年度浙江机械工业科学技术奖一等奖
近三年智能机器人方向主要项目:
浙江省自然科学基金重点项目 | 基于深度强化学习的智能机器人自主决策方法研究 | 2023-2025 |
浙江省重点研发计划项目 | 智能双臂服务机器人的研发与应用 | 2020-2022 |
国家自然科学基金面上项目 | 面向自主抓取任务的移动机器人视觉感知方法研究 | 2019-2022 |
浙江省重点研发计划项目 | 基于视觉反馈的集装箱组合式万向自动搬运机器人研究与应用 | 2018-2020 |
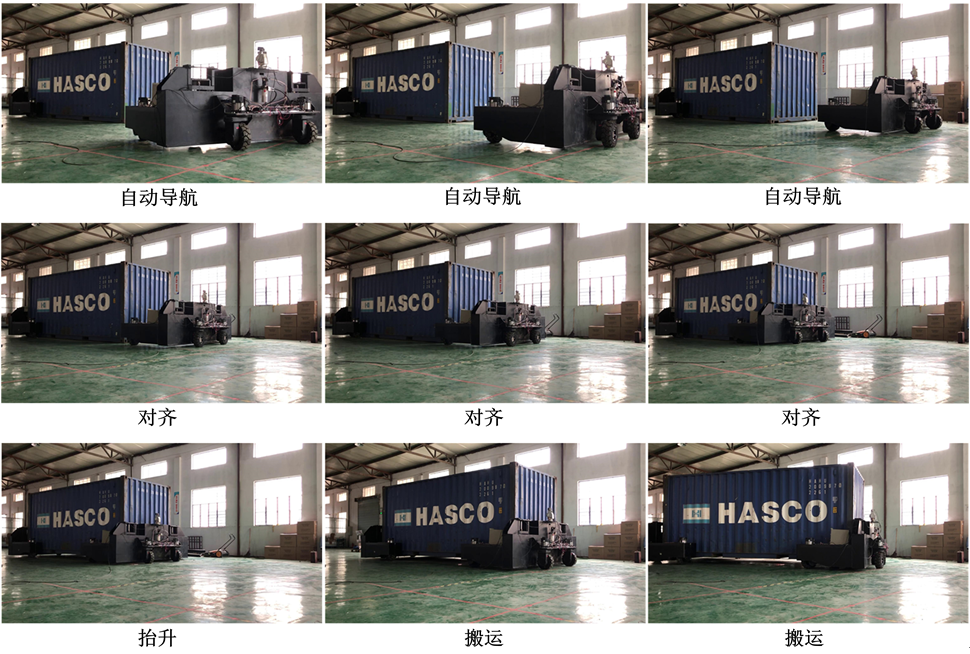
图 基于视觉引导的双机器人自动锁定和协同搬运研究成果
(5)FPGA硬件加速与算法优化方向:研究基于FPGA的各类算法优化技术与硬件加速实现技术,主要包括基于FPGA的深度学习网络压缩剪枝、电机伺服算法优化、机械臂轨迹控制算法优化、虚拟机VirtIO网络卸载及存储卸载加速、合成孔径算法优化、超高速陈列相机采集控制等。与华为等企业开展产学研合作,相关方向承担了企业横向项目多项,相关成果已申请发明专利20余件。
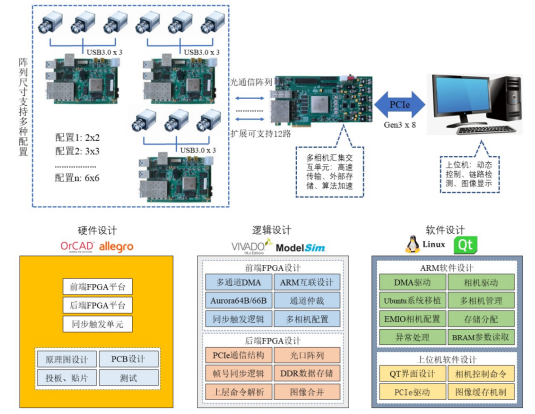
图 基于内嵌ARM硬核FPGA的超高速阵列式相机电控系统研究成果